大腸癌手術における
AI物体認識モデルおよび
サージカルロボットシステムを
活用した手術の再現と
手技の定量化の検討
【背景】
●自動手術を念頭に、外科手術におけるAIシステムの開発を行っており、将来AIシステムをロボット支援手術に搭載することで、手術進行補助や手術技術評価をすることを想定している。
●ロボット支援手術には、腹腔鏡手術では得られなかったログ情報のパラメータを獲得可能であり、AI解析システムへインプットすることで、手術の再現や手技の定量化が可能か検討している。サージカルロボットシステムおよび手術に関連するデータ(稼働ログ、および手術関連の映像)を用いる予定である。
●本研究における評価は、手術室の回転率向上や手術手技の向上への貢献にとどまらず、最終的には患者への安全で最適な医療の提供を目指している。
【研究内容】
大腸がん手術におけるAI システムの解析結果とサージカルロボットシステムから得られる⼿術データを統合し、⼿術の再現と⼿技の定量化に関する評価を⾏うこと。
【AI物体認識モデル】
AI物体認識モデルは、領域とともに物体が何かということを画面上に示すことが可能である(図1)。また、手術室でリアルタイムに解析可能である(図2)。
<図1>

<図2>

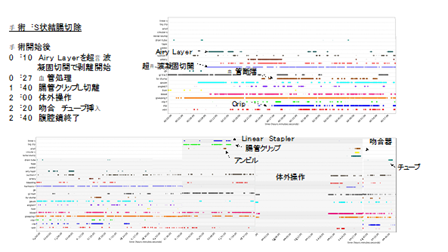
【AIによる手術画像解析】
独自に開発したAI物体認識モデルは、手術中の物体をAIに学習させ作成したものである。そのモデルに手術動画を解析させると以下のような結果を得ることが可能で、時間とともに何の物体が映っていたかの結果を得ることができる。手術がどのように進行したか、つまり何時に血管処理をしたか、吻合したかの客観的評価ができる(図3)。
<図3>
【AI解析結果とサージカルロボットシステムからの手術に関連するデータの統合】
AI 物体認識モデルによる⼿術解析結果とサージカルロボットシステムからの⼿術に関連するデータの統合から、 ⼿術がどのように⾏われたか客観的評価を⾏う。⼿術を再現し⼿技の定量化をすることで、今後⼿術技術評価や⼿術進⾏補助に発展させることを想定している。